Atlas de Boston Dynamics, le robot humanoïde le plus avancé au monde, est de retour, désormais capable de déplacer des pièces de voiture de poids moyen. S'il maîtrise les mouvements bipèdes tels que la marche, la course, le saut et même le saut périlleux arrière, il n'en est encore qu'aux premiers stades de la manipulation d'objets. Lors d'une précédente démonstration, Atlas a utilisé des pinces rudimentaires pour transporter des objets lourds tels qu'une boîte à outils, des haltères et une planche de bois. L'accent semble désormais mis sur les tâches "cinétiquement difficiles", qui nécessitent des calculs et une planification supplémentaires pour maintenir l'équilibre et éviter les chutes.
Dans la dernière vidéo, nous passons à ce qui semble être la "phase 2" de la prise d'objets : être plus précis. Les précédentes mains de serrage avaient un seul pivot au niveau de la paume et appliquaient une force de préhension maximale à tout ce que le robot soulevait. Cependant, même des objets délicats comme une planche de bois étaient endommagés. Les nouvelles mains d'Atlas semblent plus douces. Chaque main comporte trois doigts avec deux articulations. Tous les doigts partagent un grand point de pivot au niveau de la paume et ont une articulation à mi-hauteur. Ils sont longs, flexibles dans les deux sens et peuvent s'enrouler autour des objets au lieu de les écraser.
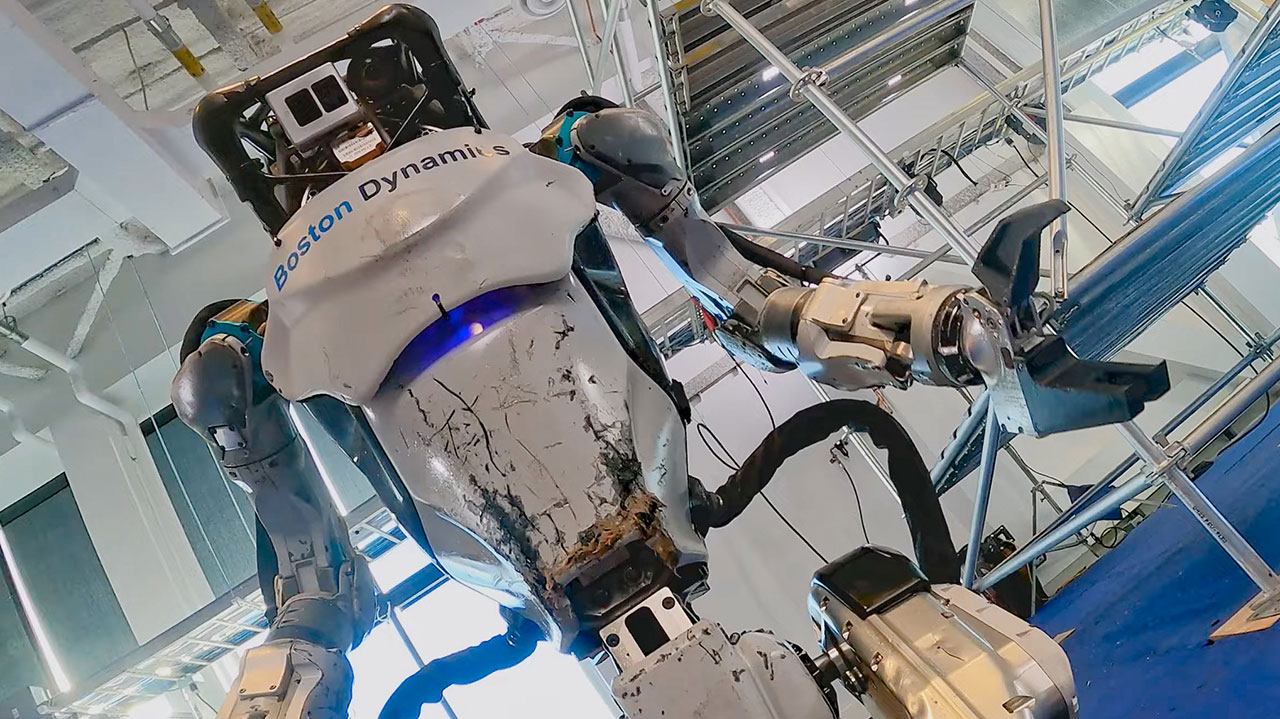
Atlas saisit un jeu de jambes de force de voiture, un objet complexe pesant environ 13 kilogrammes. Le robot effectue un levage à deux mains, plaçant avec précaution la jambe de force d'une position verticale sur une palette à une étagère. Le laboratoire de Boston Dynamics offre un environnement de manipulation difficile, la forme complexe de la jambe de force rendant la préhension délicate. En outre, la présence de grands poteaux métalliques autour du caisson de la jambe de force exige des manœuvres prudentes pour éviter les collisions. L'ajustement serré de l'étagère exige un positionnement précis pour éviter que les protubérances de la jambe de force ne la heurtent.
L'une des limites de la vidéo est que certains éléments intelligents y sont précalculés. Par exemple, nous voyons ce qui semble être le traitement de la vision d'Atlas, qui dispose déjà d'un scan 3D parfait de la jambe de force de la voiture. Cela suggère qu'Atlas a une connaissance préalable de la jambe de force sous tous les angles ou qu'il a été préprogrammé avec des données topographiques pour ce modèle spécifique. Quoi qu'il en soit, Atlas n'a pas à relever le défi de déterminer la forme de l'objet en temps réel. Grâce à son capteur lidar et à la génération de nuages de points, Atlas n'a plus qu'à aligner le modèle précuit sur le nuage de points pour obtenir une compréhension complète de la topographie de la jambe de force. La manipulation d'un objet qu'Atlas n'a jamais vu auparavant présenterait un niveau de difficulté plus élevé, mais diviser les défis en petites parties est un bon point de départ.


Atlas de Boston Dynamics
Lorsqu'Atlas saisit une jambe de force, il fait le tour d'une palette, mettant ainsi en évidence son exceptionnel mouvement bipède. Alors qu'une approche plus simple impliquerait des trajectoires de marche en ligne droite avec des pivots, la planification des trajectoires d'Atlas est plus complexe. Il incorpore des mouvements avancés de pas de côté, se penche dans les virages et trébuche dynamiquement autour de la palette. Cette version d'Atlas ressemble moins à un robot qu'à une personne ivre, ce qui est un grand compliment. À un moment donné, il trébuche même et se rétablit, ce qui suscite une réaction enthousiaste de la part des spectateurs à l'arrière-plan.
Source : Arstechnica
