Роботы, созданные в Исследовательском институте Toyota, теперь могут взаимодействовать с окружающим миром различными способами, что в перспективе позволит роботам помогать человеку в повседневных ситуациях и непредсказуемых, постоянно меняющихся условиях.
Toyota Research Institute (TRI) объявил о создании прорывного генеративного ИИ, позволяющего быстро и уверенно обучать роботов новым навыкам. По словам исследователей, это достижение значительно повышает полезность роботов и является шагом к созданию "больших моделей поведения" (Large Behavior Models, LBMs) для роботов, аналогичных большим языковым моделям (Large Language Models, LLMs), которые недавно произвели революцию в разговорном ИИ.
"Наши исследования в области робототехники направлены на усиление роли человека, а не на его замену", - сказал Гилл Пратт, генеральный директор TRI и главный научный сотрудник Toyota Motor Corporation, - "Эта новая техника обучения очень эффективна и создает очень высокоэффективные модели поведения, что позволяет роботам гораздо эффективнее усиливать роль человека во многих отношениях".





Новая технология генеративного ИИ приблизила исследователей к созданию "большой модели поведения"
Существовавшие ранее современные методы обучения роботов новому поведению были медленными, непоследовательными, неэффективными и часто ограничивались узко поставленными задачами, выполняемыми в условиях жестких ограничений. Робототехникам приходилось тратить много часов на написание сложного кода и/или использовать многочисленные циклы проб и ошибок для программирования поведения.
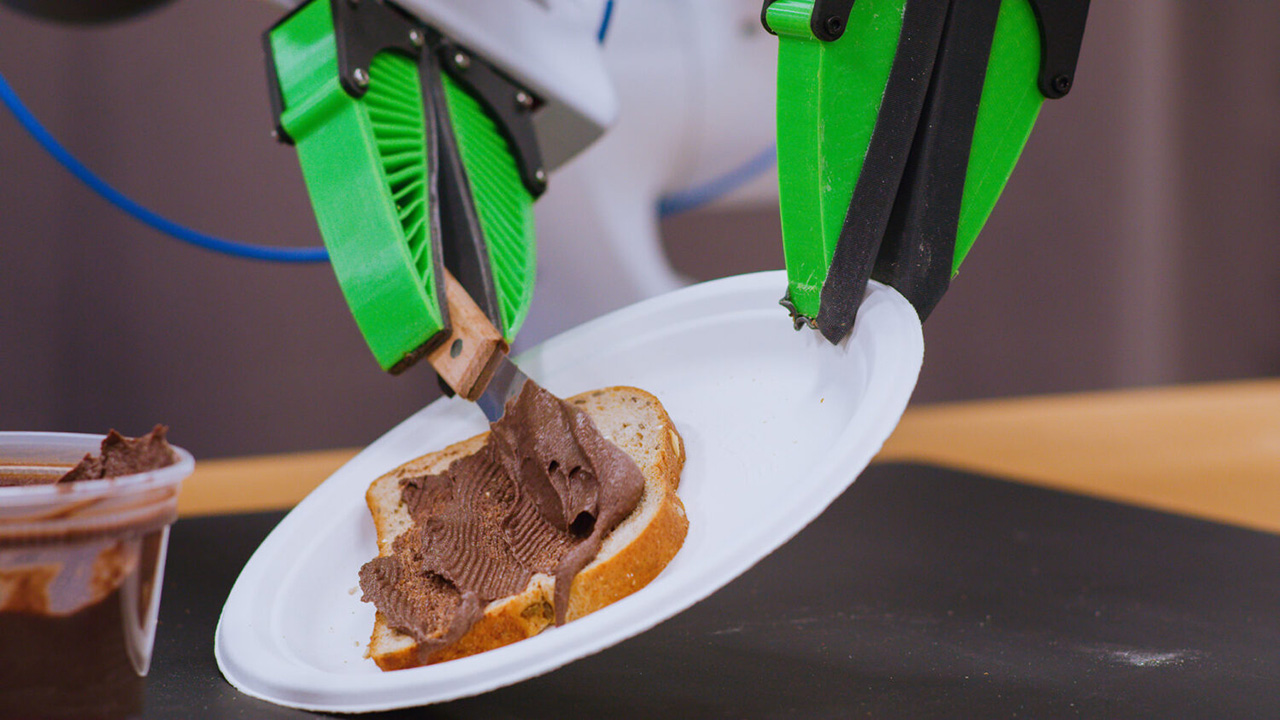
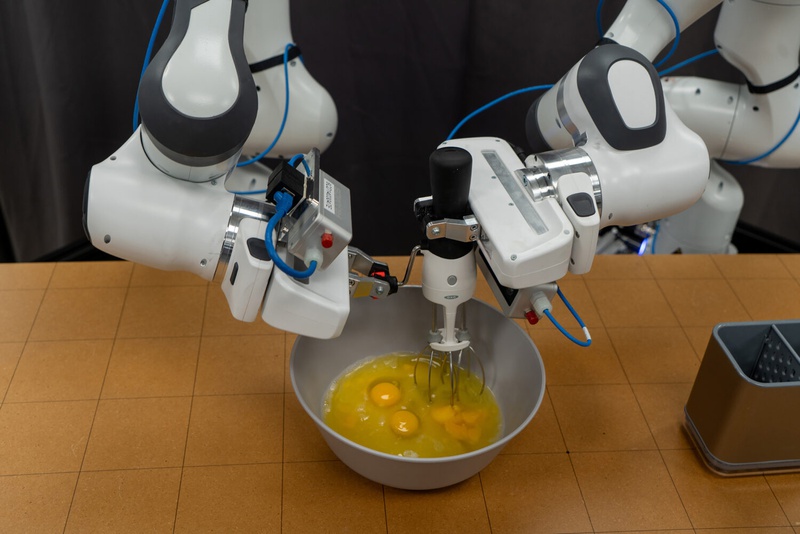
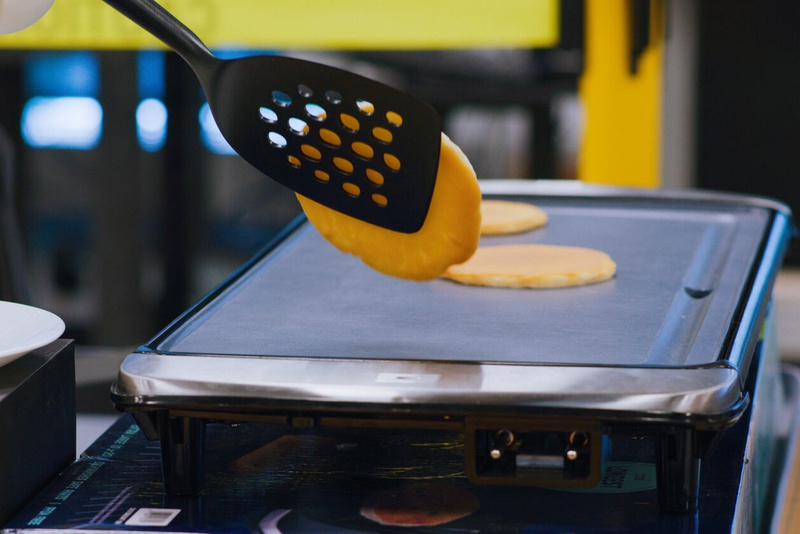
С помощью нового подхода TRI уже обучила роботов более чем 60 сложным, ловким навыкам, включая переливание жидкостей, использование инструментов и манипулирование деформируемыми объектами. Эти достижения были достигнуты без написания одной строки нового кода, единственным изменением было предоставление роботу новых данных. Развивая этот успех, компания TRI поставила перед собой амбициозную цель - обучить сотни новых навыков к концу этого года и 1000 - к концу 2024 года.
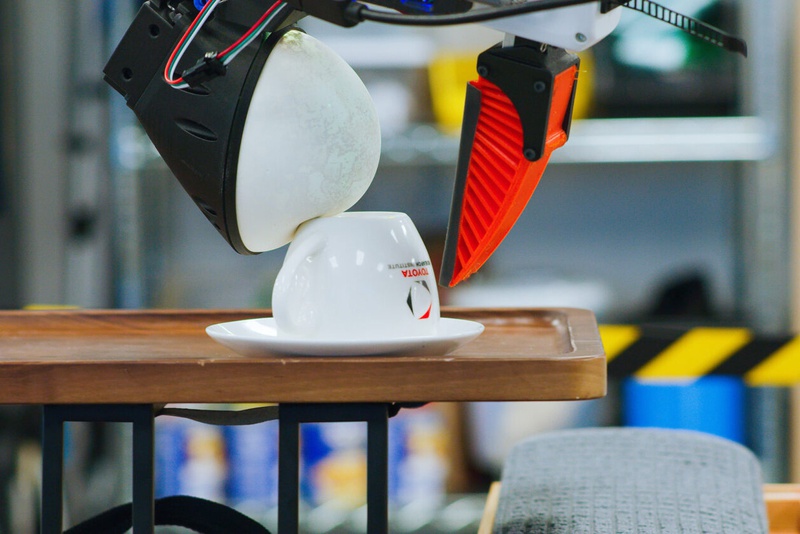
Сегодняшняя новость также подчеркивает, что роботов можно научить работать в новых сценариях и выполнять широкий спектр действий. Эти возможности не ограничиваются "подбором и размещением" или простым подбором предметов и размещением их в новых местах. Роботы TRI теперь могут взаимодействовать с миром разнообразными способами, что в перспективе позволит роботам помогать людям в повседневных ситуациях и непредсказуемых, меняющихся условиях окружающей среды.
"Задачи, которые я наблюдаю за выполнением этих роботов, просто поразительны - еще год назад я бы не смог предположить, что мы приблизимся к такому уровню разнообразной ловкости", - заметил Расс Тедрейк, вице-президент TRI по исследованиям в области робототехники.
Доктор Тедрейк, который также является профессором Toyota по электротехнике и компьютерным наукам, аэронавтике и астронавтике, а также машиностроению в Массачусетском технологическом институте, пояснил: "Что особенно интересно в этом новом подходе, так это скорость и надежность, с которой мы можем добавлять новые навыки. Поскольку эти навыки формируются непосредственно на основе изображения с камеры и тактильных ощущений, используя только заученные представления, они способны хорошо справляться даже с задачами, связанными с деформируемыми объектами, тканью и жидкостями, которые традиционно были чрезвычайно сложны для роботов".
Если говорить более подробно, то модель поведения робота TRI обучается на основе тактильных демонстраций учителя в сочетании с лингвистическим описанием цели. Затем она использует основанную на ИИ диффузионную политику для обучения продемонстрированному навыку. Этот процесс позволяет автономно формировать новое поведение на основе десятков демонстраций. Такой подход не только позволяет получать последовательные, повторяющиеся и эффективные результаты, но и делает это с невероятной скоростью.
Источник: Toyota


