Toyota Research Institute (TRI) оголосив про створення проривного генеративного ШІ, що дає змогу швидко і впевнено навчати роботів нових навичок. За словами дослідників, це досягнення значно підвищує корисність роботів і є кроком до створення "великих моделей поведінки" (Large Behavior Models, LBMs) для роботів, аналогічних великим мовним моделям (Large Language Models, LLMs), які нещодавно зробили революцію в розмовному ШІ.
"Наші дослідження в галузі робототехніки спрямовані на посилення ролі людини, а не на її заміну", - сказав Гілл Пратт, генеральний директор TRI і головний науковий співробітник Toyota Motor Corporation, - "Ця нова техніка навчання дуже ефективна і створює дуже високоефективні моделі поведінки, що дає змогу роботам набагато ефективніше посилювати роль людини в багатьох відношеннях".





Нова технологія генеративного ШІ наближає дослідників на крок до створення "великої моделі поведінки"
Попередні найсучасніші методи навчання роботів новій поведінці були повільними, непослідовними, неефективними і часто обмежувалися вузько визначеними завданнями, що виконувалися в дуже обмеженому середовищі. Робототехнікам доводилося витрачати багато годин на написання складного коду та/або використовувати численні цикли спроб і помилок для програмування поведінки.
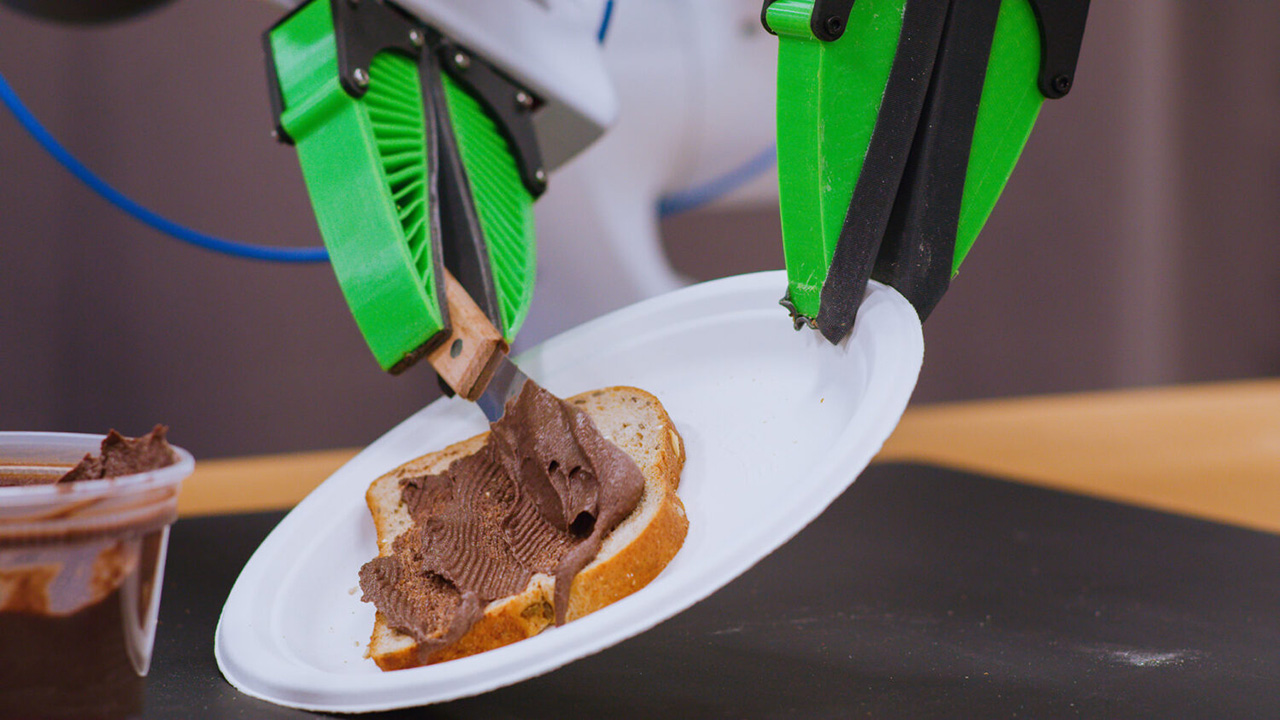
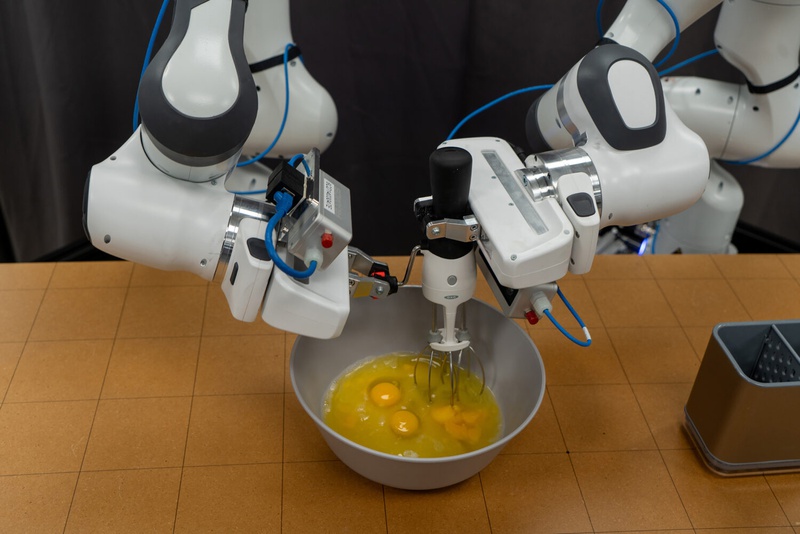
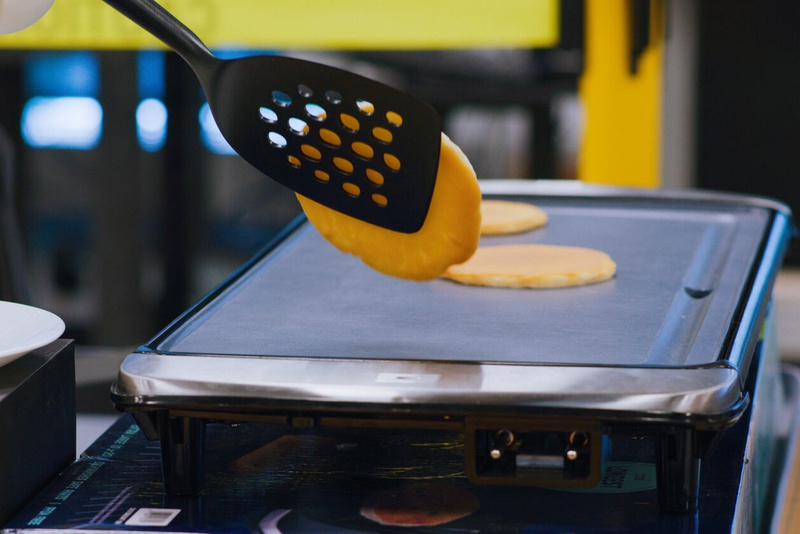
За допомогою нового підходу TRI вже навчив роботів більш ніж 60 складним і вправним навичкам, включаючи розливання рідин, використання інструментів і маніпулювання деформівними об'єктами. Ці досягнення були реалізовані без написання жодного рядка нового коду; єдиною зміною було забезпечення робота новими даними. Спираючись на цей успіх, TRI поставив перед собою амбітну мету навчити сотні нових навичок до кінця року і 1000 - до кінця 2024 року.
Сьогоднішні новини також підкреслюють, що роботів можна навчити функціонувати в нових сценаріях і виконувати широкий спектр дій. Ці можливості не обмежуються функцією "візьми і розмісти" або просто взяттям об'єктів і розміщенням їх у нових місцях. Роботи TRI тепер можуть взаємодіяти зі світом у різноманітні способи, що колись дозволить роботам допомагати людям у повсякденних ситуаціях та непередбачуваному мінливому середовищі.
"Завдання, які виконують ці роботи, просто вражають - навіть рік тому я не міг передбачити, що ми наблизилися до такого рівня різноманітної спритності", - зауважив Расс Тедрейк, віце-президент з досліджень робототехніки в TRI.
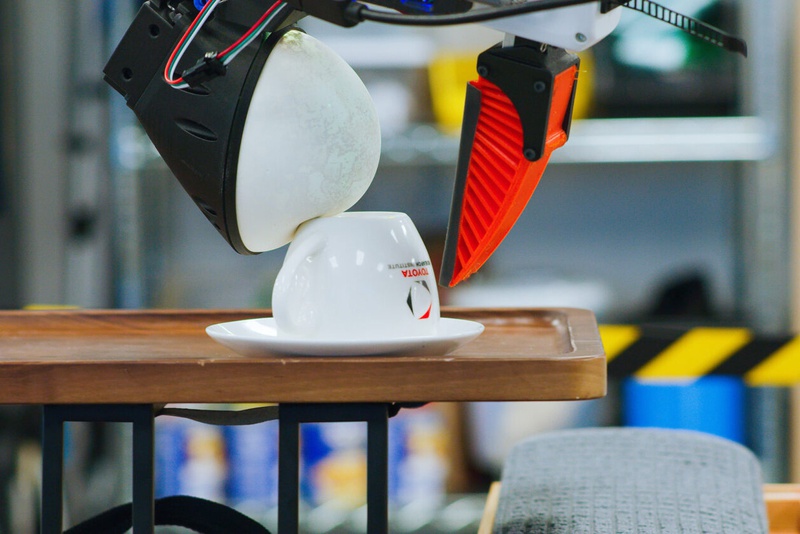
Доктор Тедрейк, який також є професором електротехніки та комп'ютерних наук, аеронавтики та астронавтики, а також машинобудування в Массачусетському технологічному інституті (MIT), пояснив: "Що так захоплює в цьому новому підході, так це швидкість і надійність, з якою ми можемо додавати нові навички. Оскільки ці навички працюють безпосередньо на основі зображень з камер і тактильних відчуттів, використовуючи лише вивчені репрезентації, вони здатні добре виконувати навіть завдання, які включають деформовані об'єкти, тканину і рідини - все, що традиційно було надзвичайно складним для роботів".
Якщо говорити більш технічно, то модель поведінки робота TRI навчається на основі тактильних демонстрацій вчителя в поєднанні з лінгвістичним описом мети. Потім вона використовує політику дифузії на основі штучного інтелекту, щоб засвоїти продемонстровану навичку. Цей процес дозволяє розгортати нову поведінку автономно з десятків демонстрацій. Цей підхід не тільки дає послідовні, повторювані та ефективні результати, але й робить це з неймовірною швидкістю.
Джерело: Toyota
