Le Toyota Research Institute (TRI) a annoncé une approche générative de l'IA basée sur la politique de diffusion pour enseigner rapidement et en toute confiance aux robots de nouvelles compétences dextrogyres. Selon les chercheurs, cette avancée améliore considérablement l'utilité des robots et constitue une étape vers la construction de "grands modèles de comportement (LBM) pour les robots, analogues aux grands modèles de langage (LLM) qui ont récemment révolutionné l'IA conversationnelle.
"Cette nouvelle technique d'apprentissage est à la fois très efficace et produit des comportements très performants, ce qui permet aux robots d'amplifier beaucoup plus efficacement les personnes à bien des égards".





Une nouvelle technique d'IA générative rapproche les chercheurs de la construction d'un "grand modèle de comportement".
Les techniques de pointe utilisées jusqu'à présent pour enseigner de nouveaux comportements aux robots étaient lentes, incohérentes, inefficaces et souvent limitées à des tâches étroitement définies effectuées dans des environnements très contraignants. Les roboticiens devaient passer de nombreuses heures à écrire des codes sophistiqués et/ou à utiliser de nombreux cycles d'essais et d'erreurs pour programmer des comportements.
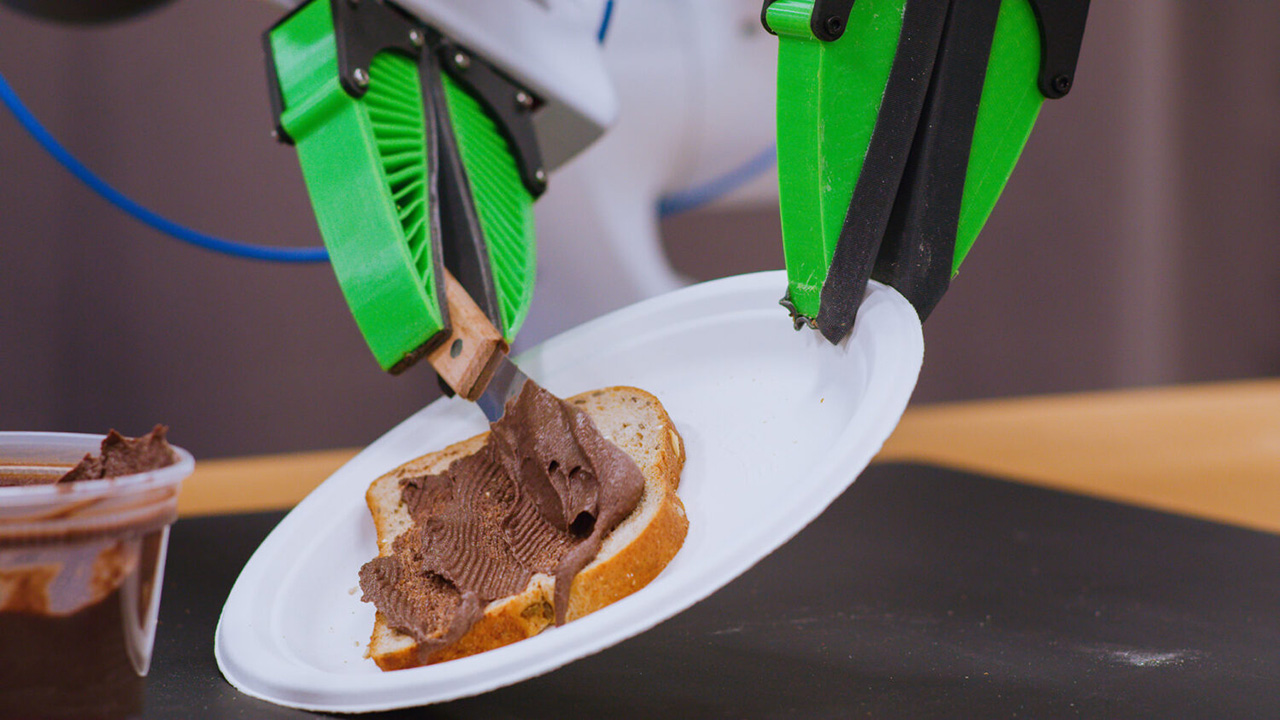
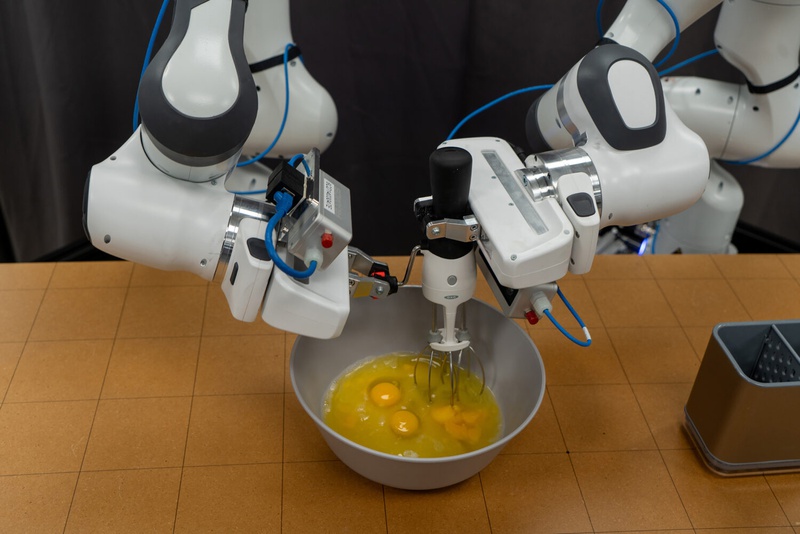
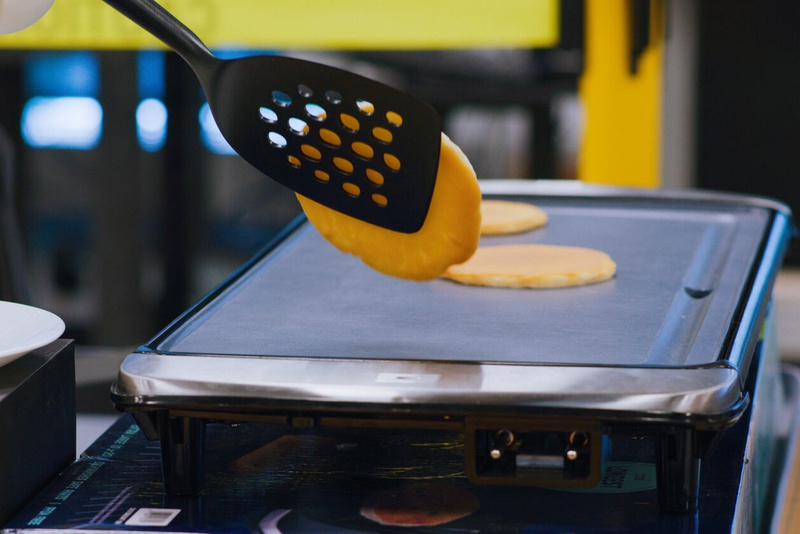
TRI a déjà enseigné aux robots plus de 60 compétences difficiles et dextres en utilisant la nouvelle approche, y compris le versement de liquides, l'utilisation d'outils et la manipulation d'objets déformables. Ces résultats ont été obtenus sans écrire une seule ligne de nouveau code ; le seul changement a consisté à fournir de nouvelles données au robot. Fort de ce succès, TRI s'est fixé l'objectif ambitieux d'enseigner des centaines de nouvelles compétences d'ici la fin de l'année et un millier d'ici la fin de l'année 2024.
Les nouvelles d'aujourd'hui soulignent également qu'il est possible d'apprendre aux robots à fonctionner dans de nouveaux scénarios et à adopter un large éventail de comportements. Ces capacités ne se limitent pas au "pick and place" ou au simple fait de ramasser des objets et de les placer à de nouveaux endroits. Les robots de TRI peuvent désormais interagir avec le monde de diverses manières, ce qui leur permettra un jour d'aider les humains dans des situations quotidiennes et dans des environnements imprévisibles et changeants.
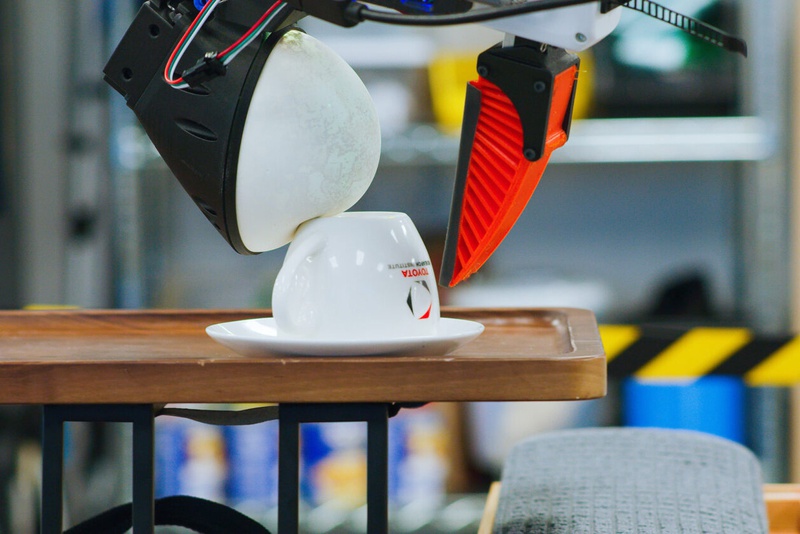
"Les tâches que je vois ces robots accomplir sont tout simplement stupéfiantes. Il y a un an encore, je n'aurais pas pensé que nous serions proches de ce niveau de dextérité", a déclaré Russ Tedrake, vice-président de la recherche en robotique à l'IRT. M. Tedrake, qui est également professeur de génie électrique et d'informatique, d'aéronautique et d'astronautique, et de génie mécanique au MIT, explique : "Ce qui est si passionnant dans cette nouvelle approche, c'est le rythme et la fiabilité avec lesquels nous pouvons ajouter de nouvelles compétences. Comme ces compétences fonctionnent directement à partir des images de la caméra et de la détection tactile, en utilisant uniquement des représentations apprises, elles sont capables de donner de bons résultats même pour des tâches impliquant des objets déformables, des tissus et des liquides, qui ont toujours été extrêmement difficiles pour les robots".
En termes plus techniques, le modèle de comportement des robots de TRI apprend à partir de démonstrations haptiques effectuées par un enseignant, combinées à une description linguistique de l'objectif. Il utilise ensuite une politique de diffusion basée sur l'IA pour apprendre la compétence démontrée. Ce processus permet de déployer un nouveau comportement de manière autonome à partir de dizaines de démonstrations. Non seulement cette approche produit des résultats cohérents, reproductibles et performants, mais elle le fait à une vitesse incroyable.
Source : Toyota
